








Направи дарение на училище!

Чуй текста:

Ако си мислите за традиционен робот, най-вероятно си представяте нещо, изработено от метал и пластмаса. Такъв тип роботи са изработени от твърди материали. Тъй като роботите поемат повече роли извън лабораторията, такива твърди системи могат да представляват рискове за безопасността на хората, с които взаимодействат. Например, ако промишлен робот се залюлее към човек, има риск от синини или нараняване на костите.
Изследователите все по-често търсят решения, които да направят роботите по-меки или по-съвместими – по-малко като твърди машини, повече като животни. С традиционните механизми – като двигатели – това може да означава използване на „въздушни мускули” или добавяне на пружини паралелно с моторите. Например, роботът Whegs има пружина между мотора и крака на колелото (wheel + leg = Wheg), което означава, че ако роботът попадне на нещо (като човек), пружината абсорбира част от енергията, така че човекът да не се нарани. Бронята на прахосмукачката робот Roomba е още един пример; тя е с пружина, така че Roomba да не поврежда нещата, в които се блъска.
Но областта на научни изследвания, които търсят по-различен подход, става все по-обширна. Чрез комбиниране на роботиката с тъканното инженерство, ние започваме да изграждаме роботи, задвижвани от жива мускулната тъкан или клетки. Тези устройства могат да бъдат стимулирани с електричество или със светлина, за да бъдат накарани клетките да се съкращават и да задвижват скелетите, към които са прикрепени, карайки робота да плува или да пълзи. Получените биоботи могат да се движат и са меки като животни. Те са по-безопасни за хората и обикновено по-малко вредни за околната среда в която работят, отколкото традиционният робот може да бъде. Както животните, те се нуждаят от хранителни вещества за захранване на своите мускули, вместо батерии, а освен това биохибридните роботи са по-леки.
Разбери повече за БГ Наука:
Изграждане на биобот
Изследователите измайсторяват биоботите с отглеждане на живи клетки, обикновено от сърце или скелетните мускули на плъхове или пилета, върху матрици, които не са токсични за клетките. Ако субстратът е полимер, създаденото устройството е биохибриден робот – хибрид между естествени и изкуствени материали.
Ако просто поставите клетки върху монолитен скелет без никакви насоки, в крайна сметка те ще заемат случайни позиции. Това означава, че когато изследователите прилагат електричество, за да ги накарат да се движат, съкращаващите сили на клетките ще се прилагат във всички посоки, което прави устройството най-малкото неефективно.
Така че за по-добро обуздаване на енергия на клетките, учените се обръщат към микромоделирането. Ние отбелязваме или отпечатваме микролинии върху скелета, направен от вещества, към които клетките предпочитат да се прикрепят. Тези линии насочват клетките, така че докато растат, те се наместват по отпечатания модел. Когато клетките са подредени, учените могат да определят как да се прилага тяхната съкращаваща сила към субстрата. Така че вместо една бъркотия от съкращаващи се клетки, всички те могат да работят в унисон, за да преместят крака или перката на устройството.
Биохибридни роботи, вдъхновени от животни
Освен широка гама биохибридни роботи, изследователите са създали някои напълно органични роботи, използвайки естествени материали, като колаген от кожата, вместо полимери за тялото на устройството. Някои могат да пълзят или да плуват, когато са стимулирани от електрическо поле. Някои са вдъхновени от инженерни техники за медицински тъкани и използват дълги правоъгълни ръце (или конзоли), за да се издърпат напред.
Други са взели своите черти от природата, създавайки биологично вдъхновени биохибриди. Например, група, водена от изследователи в Калифорнийския технологичен институт, разработва биохибриден робот, вдъхновен от медузи. Това устройство, което те наричат медузоид, има ръце, подредени в кръг. Всяка ръка е микромоделирана с протеинови линии, така че клетките да растат в модели, подобни на мускулите в жива медузи. Когато клетките се съкращават, ръцете се сгъват навътре, задвижвайки биохибридния робот напред в богата на хранителни вещества течност.
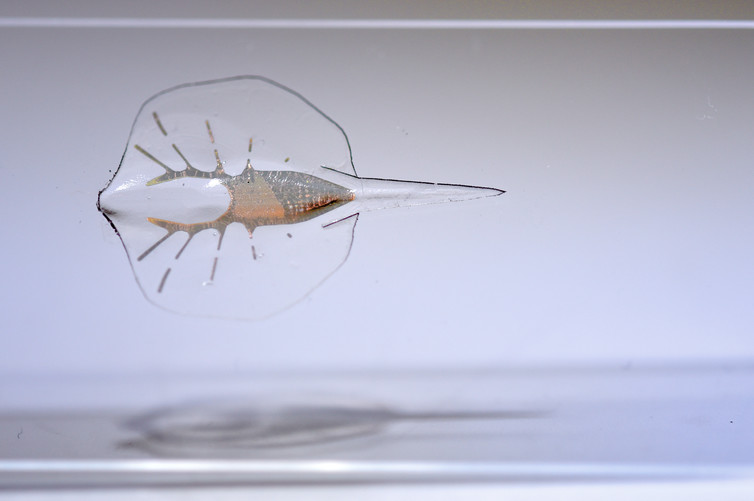
Съвсем наскоро изследователите са показали как да се насочват биохибридните творения. Една група в Харвард използва генетично модифицирани сърдечни клетки, за да направи плуващ робот, вдъхновен от рибата скат. Сърдечните клетки били променени да се свиват в отговор на специфични честоти на светлината – от едната страна на робота има клетки, които отговарят на една честота, а клетките от другата страна отговарят на друга.
Когато изследователите осветяват предната част на робота, клетките там се съкращават и изпращат електрически сигнали към клетките по-нататък по тялото му. Съкращаването се разпространява по тялото на робота, премествайки устройството напред. Изследователите могат да завъртят робота надясно или наляво, променяйки честотата на светлината. Ако пуснат повече светлина на честотата, на която клетките от едната страна реагират, съкращаването на тази страна на „ската” ще е по-силно, което позволява на учените да насочат движението на робота.
Заздравяване на биоботите
Докато се правят вълнуващи разработки в областта на биохибридната роботика, все още има значително количество работа за вършене, за да се извадят устройствата от лабораторията. Устройствата в момента имат ограничена продължителност на живота и не притежават достатъчно голяма сила, което ограничава тяхната бързина и способност за изпълнение на задачи. Роботите, направени от клетки на бозайници или на птици, са доста придирчиви относно условията на околната среда. Например, температурата на околната среда трябва да бъде близо до биологичната телесна температура и клетките се нуждаят от редовно хранене с богати на хранителни вещества течности. Една от възможните мерки е да се опаковат устройствата така, че мускулите да са защитени от външната среда и постоянно да се къпят в хранителни вещества.
Друг вариант е да се използват по-стабилни клетки като задвижващи механизми. В университета Case Western Reserve, наскоро започнали да разследват тази възможност, като се обърнали към жилавия морски охлюв Aplysia californica . Тъй като А. californica живее в приливна зона, може да изпитва големи промени в температурата и солеността на околната среда в рамките на един ден. Когато има отлив, морските охлюви може да се озоват в капан в приливните басейни. Слънчевото греене може да изпари водата и температурата ще се повиши. От друга страна, в случай на дъжд, солеността на водата наоколо може да се понижи. Когато дойде приливът, морските охлюви са освободени от приливните басейни. Морските охлюви са развили много жилави клетки, за да издържат на това променливо местообитание.
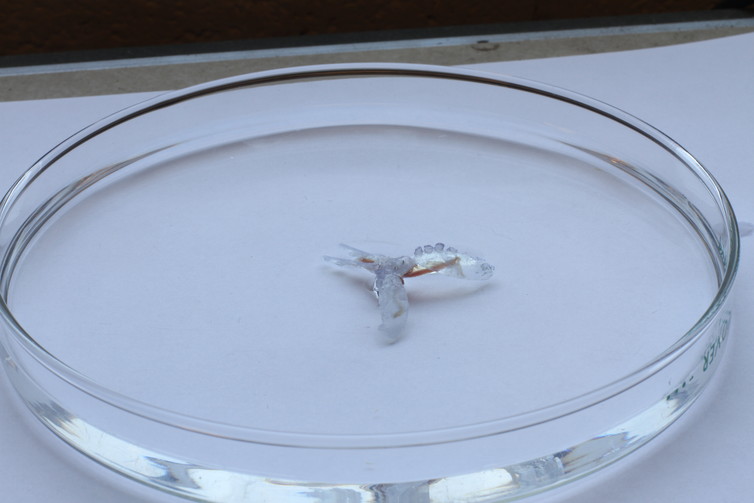
Екипът успял да използва тъкан от Aplysia, за да задейства биохибриден робот, което предполага, че можем да произвеждаме по-здрави биоботи с използването на тези еластични тъкани. Устройствата са достатъчно големи, за да носят малък товар – с дължина около 1,5 инча и широчина един инч.
Друго предизвикателство в разработването на биоботите е, че в момента на устройствата им липсва каквато и да е бордова контролна система. Вместо това, инженерите ги контролират чрез външни електрически полета или светлина. За да се развият напълно автономни биохибридни устройства, ще имаме нужда от контролери, които взаимодействат директно с мускулите и осигуряват сензорни входове към самия биохибриден робот. Една от възможностите е да се използват неврони или групи от неврони, наречени ганглии, като органични контролери.
Това е още една причина, поради която използването на Aplysia е вълнуващо. Този морски охлюв е моделна система за невробиологични научни изследвания в продължение на десетилетия. Вече се знае много за връзките между неговата нервна система и мускулите, което означава, че бихме могли да използваме неговите неврони като органични контролери, които казват на робота по какъв начин да се движи и да му помогне да изпълнява задачи, като например намирането на токсини или да следва светлина.
Докато тази област все още е в начален стадий от развитието си, изследователите предвиждат много интригуващи приложения на биохибридните роботи. Например, малките устройства, използващи тъкан на морски охлюв, могат да бъдат пуснати на рояци във водни съоръжения или в океана, за да търсят токсини или спукани тръби. Благодарение на биологичната съвместимост на устройствата, ако се счупят или бъдат изядени от дивите животни, тези екологични сензори теоретично не биха представлявали същата заплаха за околната среда, както биха били традиционните роботи.
Един ден могат да бъдат произведени устройства от човешки клетки и да се използват за медицински приложения. Биоботите могат да осигурят таргетирана доставка на лекарства, отстраняване на съсиреци или като стентове. Чрез използването на органични субстрати вместо полимери, такива стентове могат да бъдат използвани за укрепване на слаби кръвоносни съдове, за предотвратяване на аневризми – а с течение на времето устройствата ще бъдат реорганизирани и интегрирани в тялото. Отвъд дребномащабните биохибридни роботи, които се разработват в момента, продължават изследванията в тъканното инженерство, например опити да се създадат съдови системи, които може да отворят възможност за отглеждане на големи роботи, задействани от мускули.
Превод: Гергана Димитрова
Източник: IFLS
Вземете (Доживотен) абонамент и Подарете един на училище по избор!